Zabawę w FPV rozpocząłem rok temu od budowy 3 calowego cinewhoopa. W tym roku przyszedł czas na 5 cali. Podzespoły dobrałem na podstawie lektury wpisów w internecie i filmów na Youtube. Miało być porządnie i ekonomicznie więc nie są to komponenty z najwyższych półek.

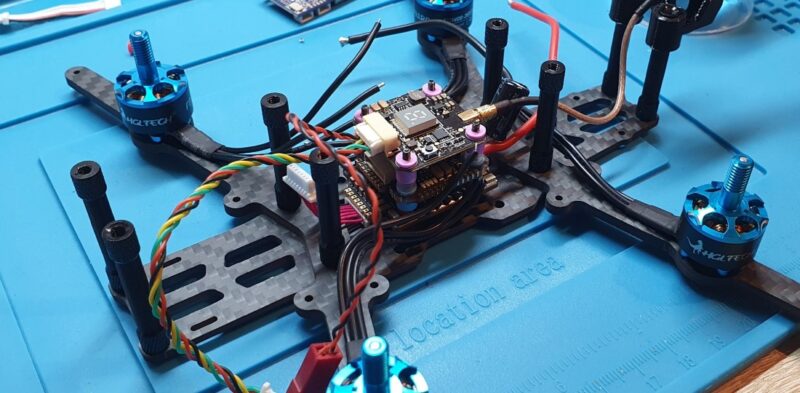
Maszyna poskładana bez większych problemów. Doświadczenie zdobyte podczas budowy poprzedniej konstrukcji pomogło przejść ten etap szybko i sprawnie. Nie będę tutaj opisywał jak się buduje drona FPV, bo na Youtube jest mnóstwo filmów na ten temat, ale wypiszę wszystkie części i podam ustawienia kontrolera lotu. Może to być przydatne dla kogoś, kto będzie chciał powielić tą konstrukcję. Dobór elementów takich jak kontroler lotu, nadajnik wizji czy kamera FPV nie jest krytyczny. Można użyć czegoś innego o podobnych parametrach. Na charakterystykę lotu największy wpływ ma rama, silniki, bateria i całkowita waga modelu.
Lista podzespołów
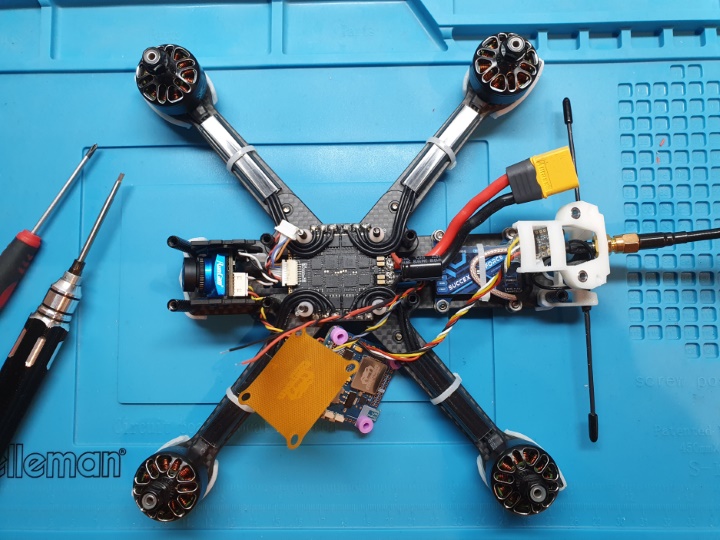
- Rama: IFlight Cidora SL5 V2.1
- Kontroler lotu: – Diatone MAMBA F722APP
- Kontroler obrotów silników (ESC): Diatone F60PRO 60A
- Silniki: IFlight XING-E 2207 Pro 2450KV
- Nadajnik wizji: iFlight SucceX Force 800mW VTX
- Kamera FPV: RunCam Phoenix 2
- Link RC, odbiornik: TBS Crossfire Nano RX
- Antena nadajnika wizji: Foxeer Lollipop 5,8GHz
- Śmigła: HQPROP Ethix S4 5″ Lemon Lime (5037)
- Bateria: 4S 1500 mAh LiPo battery
- Kamera HD: Runcam 5 Orange + ND8 filter
Jak widać wybrałem baterię 4S i wizję analogową. Trochę nie na czasie, ale baterie już miałem od poprzedniego drona, a analogową wizję wybrałem celowo, bo wiem, że na jednym czy dwóch dronach się nie skończy. Air unit do cyfrowej wizji kosztuje tyle co cały dron ze średniej półki. Poza tym podoba mi się analogowe OSD. Nie oznacza to, że mówię kategoryczne nie wizji cyfrowej.
Ustawienia FC i ESC
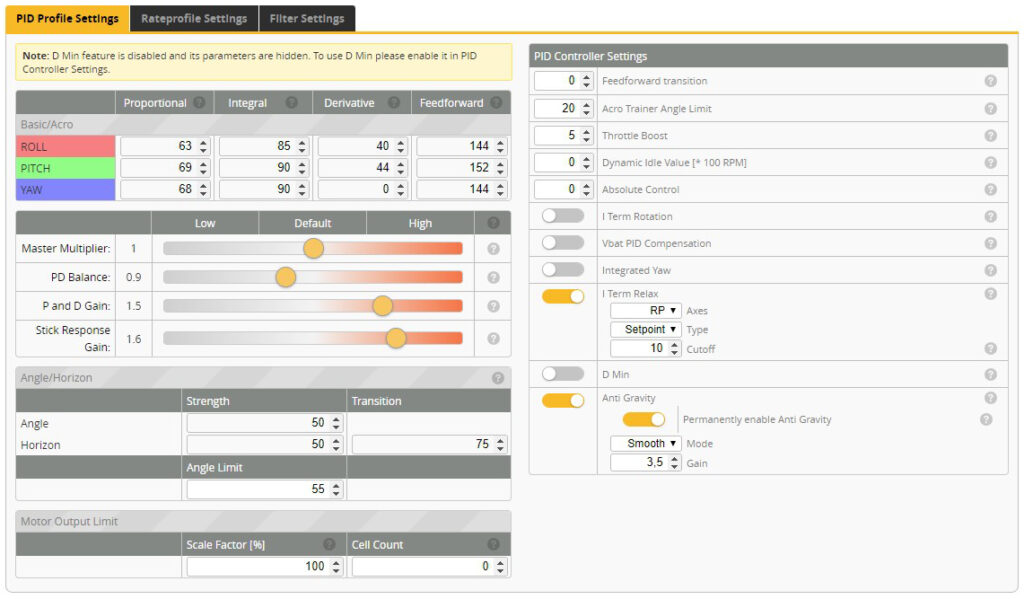
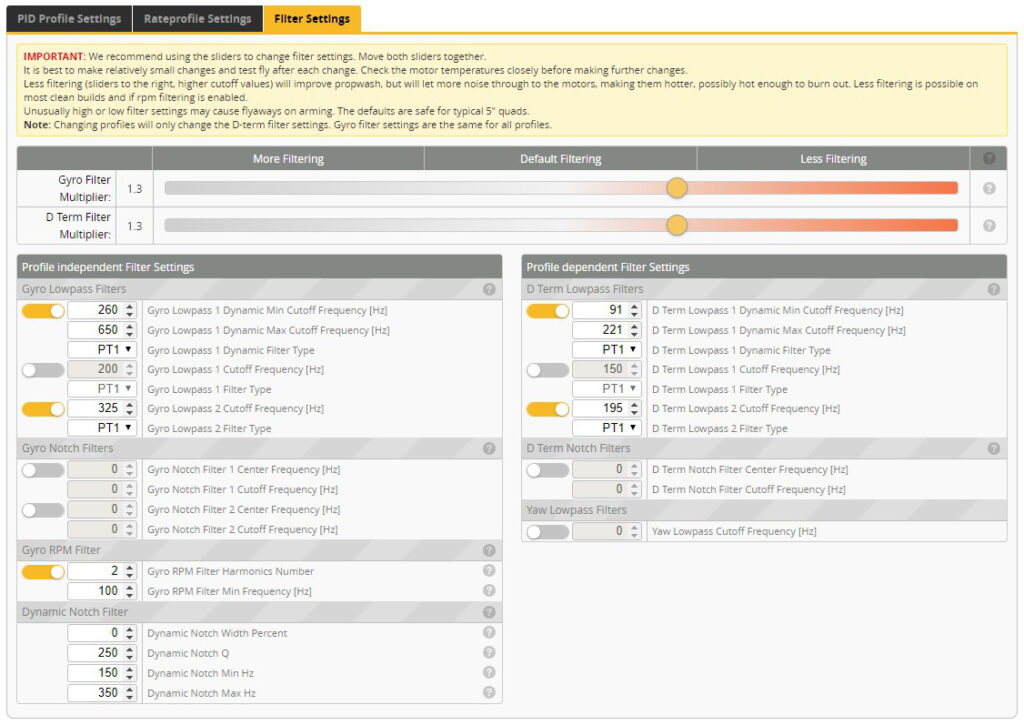
Na screenshotach widać najważniejsze ustawienia kontrolera lotu, resztę trzeba ustawić zgodnie z własnymi preferencjami i posiadanym sprzętem. Dołączam także zrzut konfiguracji w formie tekstu, który można zaimportować w przypadku posiadania takiego samego zestawu komponentów. Mój „tuning” opiera się na zaleceniach developerów Betaflight i presetach opublikowanych przez UAVTech.
Przede wszystkim należy upewnić się, że w kontrolerze lotu jest wgrana najnowsza, stabilna wersja Betaflight. Na ten moment jest to wersja 4.2.9. Kolejna ważna rzecz to firmware w ESC. Powinno obsługiwać bidirectional DSHOT.
Komendy do wklepania w CLI:
set iterm_relax_cutoff = 10
set rc_smoothing_auto_smoothness = 20
set ff_interpolate_sp = AVERAGED_3
set ff_smooth_factor = 40
set ff_spike_limit = 55
set ff_boost = 0
set feedforward_transition = 40
set yaw_lowpass_hz = 70
set throttle_boost = 5
set throttle_boost_cutoff = 10
set dyn_lpf_dterm_curve_expo = 7
set gyro_rpm_notch_q = 800
set pidsum_limit = 1000
set pidsum_limit_yaw = 1000
saveKonfiguracja ESC: Motor Timing ustawiamy na 23-deg w BLHeli_32. Jeżeli mamy ESC z BLHeli_S, M lub JESC, ustawiamy Timing na Medium-High.
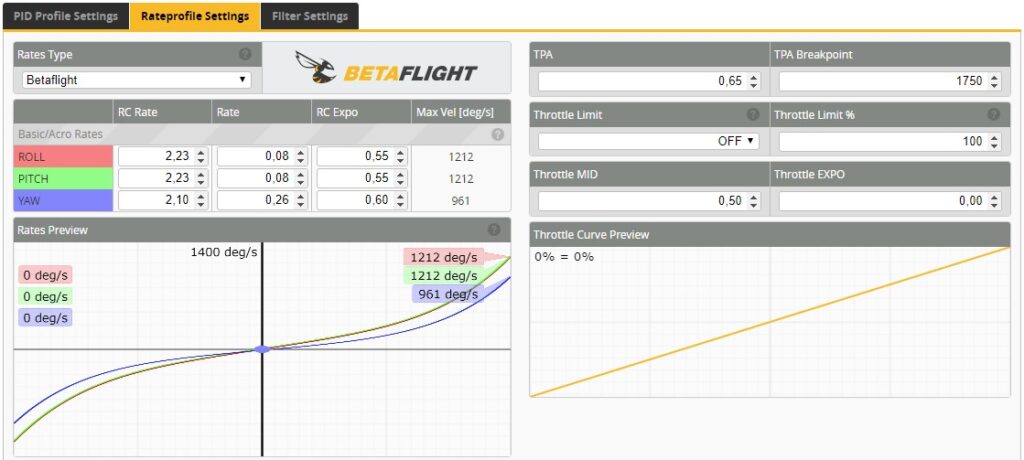
Rateprofile to oczywiście indywidualna sprawa i każdy powinien ustawić to tak jak mu pasuje.
Kilka słów na koniec
Powyższe ustawienia to żadna świętość, każdy powinien poeksperymentować żeby uzyskać jak najlepsze rezultaty. Jeżeli kopiujesz moją konfigurację to na własną odpowiedzialność. Poniżej film na którym można zobaczyć jak maszyna radzi sobie w powietrzu.